After considering different projects in which we could work, such as braille instant reader, a device to help people with Parkinson and many other, we have decided that we wanted to work with a little child who doesn’t have the left arm.
Getting involved with the project:
At the moment, the girl has an orthosis that was created by Lars Thalmann, person whose project we will try to improve, in order to suit better to the girl. In order to work in a more productive way, we have concerted a meeting with Lars on January 11.
The orthosis the girl is wearing, covers a lot of functions that made her life much easier, and she has adapted to make it suit all the different environments she faces, but we thought that maybe we could work on it and try to better the arm.
Description of the current orthosis:First of all, we are going to describe the orthosis she wears right now. This orthosis is fixed by four different straps to her left arm. There are two straps right down the shoulder, and two different straps at the top of the elbow. These straps can be adapted thanks to the use of Velcro.
When describing the arm-like part of the orthosis, we can clearly define two different areas. The one which is down the elbow, which is simulating an arm and a hand, and the upper part, which is the one that lets the arm part rise.



Developing our own ideas:
Since this will be a customized orthosis, it is important that we take exact measures of the girl. We would need to measure the length of the forearm and arm, the diameter and all the different physical magnitudes. Afterwards, we would have to use the 3D scanner as we did in class, and make a good scanner of the arm and forearm.
Once we had that, we would start to work with the other variables. When doing the project, we must consider three different fields of work: the mechanical part, the electronic part and the design part.
Lets start talking about the design part:One of the things that we know, is that the mother wants to have a textile that covers the forearm. When thinking what the most appropriate textile would be to put there, we thought that it should be an elastic piece of fabric, since the biceps and triceps are muscles that suffer a big conformational change when contracting and relaxing. Then, we thought that it could also be nice to make the textile waterproof. After doing some research, we found that solid laminated polyurethane would be the textile that can cover the requisites. In order to not interfere with the different straps that are used to be able to wear the orthosis, we thought that we could use some Velcro at the part that would be in the internal forearm (part facing the torso).
Additionally, we though that the straps could made more comfortable. In order to reduce the pressure that they make in the girl´s arm, we thought that we could add some padding into them.
Now lets talk about the mechanical part:In order to do this part properly, we have to consider how our orthosis is going to be like, and if we keep the actual design or try to make a new one. We made a model of a hand, that needs to be smoothened, but we think it could work for the girl.
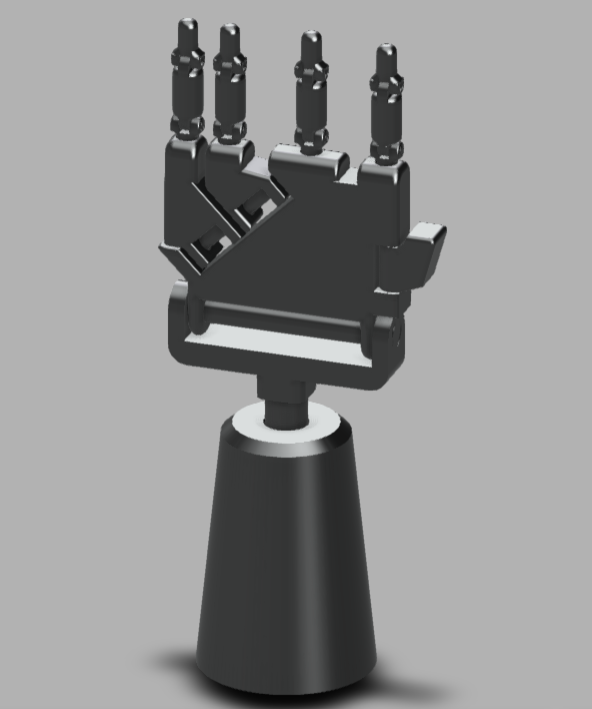
What we want to make is the arm to be able to go up and down, when the girl needs it, and the hand to be able to close and catch different objects.
In order to make the arm go up and down, since she has a little part of arm, these actions can be made mechanically by her. It would be interesting to introduce some kind of mechanism such as pulleys that would let her do the activities without having to make much effort with the biceps.
As mentioned above, we wanted to make the girl be able to grab things with the hand, by making the orthosis responsive to the movements the girl makes. After doing some research, we found that with the use of electrodes, amplifiers and a 4,8V accumulator (6 V for adults) , some new prosthetics and orthosis use measure the difference in electric current when the muscles open the Ca2+ channels, in order to contract. These are called myoelectric orthosis , and is something we would like to work with to try to make the hand close when she contracts the muscles, and open when she is relaxed.
In order to be able to do this, we should measure the different potentials of the girl with an electromyogram and then program it into an Arduino.
Finally, lets talk about the electronic part:This is the part that we would like to leave for the end, since is more a refinement part. We would have to do some basic circuitry with a motor, the electrodes and the amplifiers, but will look more into detail once we are in the lab.